這里分享一些軌跡聚類的基本方法,涉及軌跡距離的定義、kmeans聚類應(yīng)用。
需要使用的python庫如下
import pandas as pd
import numpy as np
import random
import os
import matplotlib.pyplot as plt
import seaborn as sns
from scipy.spatial.distance import cdist
from itertools import combinations
from joblib import Parallel, delayed
from tqdm import tqdm
數(shù)據(jù)讀取
假設(shè)數(shù)據(jù)是每一條軌跡一個excel文件,包括經(jīng)緯度、速度、方向的航班數(shù)據(jù)。我們從文件中讀取該數(shù)據(jù),保存在字典中。
獲取數(shù)據(jù)的地址,假設(shè)在多個文件中
def get_alldata_path(path):
all_path = pd.DataFrame(columns=['path_root','path0','path1','path2','path','datalist'])
path0 = os.listdir(path)
for path_temp0 in path0:
path1 = os.listdir(path+path_temp0)
for path_temp1 in path1:
path2 = os.listdir(path+path_temp0+'\\'+path_temp1)
for path_temp2 in path2:
path3 = os.listdir(path+path_temp0+'\\'+path_temp1+'\\'+path_temp2)
all_path.loc[all_path.shape[0]] = [path,path_temp0,path_temp1,path_temp2,
path+path_temp0+'\\'+path_temp1+'\\'+path_temp2+'\\',
path3]
return all_path
這樣你就可以得到你的數(shù)據(jù)的地址,方便后面讀取需要的數(shù)據(jù)
#設(shè)置數(shù)據(jù)根目錄
path = 'yourpath'
#獲取所有數(shù)據(jù)地址
data_path = get_alldata_path(path)
讀取數(shù)據(jù),保存成字典格式,字典的key是這條軌跡的名稱,value值是一個DataFrame,需要包含經(jīng)緯度信息。
def read_data(data_path,idxs):
'''
功能:讀取數(shù)據(jù)
'''
data = {}
for idx in idxs:
path_idx = data_path['path'][idx]
for dataname in data_path['datalist'][idx]:
temp = pd.read_excel(path_idx+dataname,header=None)
temp = temp.loc[:,[4,5,6,8]]
temp.replace('none',np.nan,inplace=True)
temp.replace('Trak',np.nan,inplace=True)
temp = temp.dropna().astype(float)
temp.columns = ['GPSLongitude','GPSLatitude','direction','speed']
data[str(idx)+'_'+dataname] = temp
return data
讀取你想要的數(shù)據(jù),前面讀取到的地址也是一個DataFrame,選擇你想要進(jìn)行聚類的數(shù)據(jù)讀取進(jìn)來。
#讀取你想要的數(shù)據(jù)
idxs = [0,1,2]
data = read_data(data_path,idxs)
定義不同軌跡間的距離
這里使用了雙向的Hausdorff距離(雙向豪斯多夫距離)
給定兩條軌跡A和B,其中軌跡A上有n個點(diǎn),軌跡B上有m個點(diǎn)。它們之間的空間相似距離d定義為:
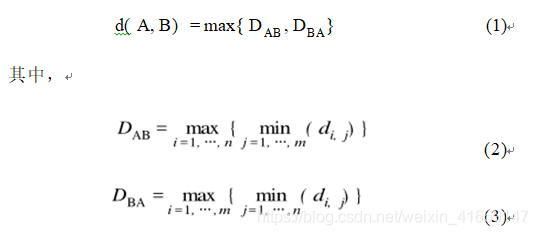
其中,di ,j 是一條軌跡上的第 i個點(diǎn)到另一條軌跡上的 第 j 個 點(diǎn)之間的多因素歐氏距離。可見, 如果軌跡 A 和 B 越相似, 它們之間的距離就越小, 反之則越大。
def OneWayHausdorffDistance(ptSetA, ptSetB):
# 計算任意向量之間的距離,假設(shè)ptSetA有n個向量,ptSetB有m個向量
# 得到矩陣C(n行m列)Cij代表A中都第i個向量到B中第j向量都距離
dist = cdist(ptSetA, ptSetB, metric='euclidean')
# np.min(dist,axis=1):計算每一行的的最小值
# 即:固定點(diǎn)集A的值,求點(diǎn)集A中到集合B的最小值
return np.max(np.min(dist, axis=1))
# 計算雙向的Hausdorff距離=====>H(ptSetA,ptSetB)=max(h(ptSetA,ptSetB),h(ptSetB,ptSetA))
# ptSetA:輸入的第一個點(diǎn)集
# ptSetB:輸入的第二個點(diǎn)集
# Hausdorff距離度量了兩個點(diǎn)集間的最大不匹配程度
def HausdorffDistance(ptSetA, ptSetB):
# 計算雙向的Hausdorff距離距離
res = np.array([
OneWayHausdorffDistance(ptSetA, ptSetB),
OneWayHausdorffDistance(ptSetB, ptSetA)
])
return np.max(res)
計算距離矩陣
每個軌跡數(shù)據(jù)都包含經(jīng)緯度、速度、方向,分別計算距離,然后根據(jù)一定的比例相加,活動最終的距離。
def DistanceMat(data,w=[0.7,0.2,0.1]):
'''
功能:計算軌跡段的距離矩陣
輸出:距離矩陣
'''
#要計算的組合
ptCom = list(combinations(list(data.keys()),2))
#基于軌跡的距離
distance_tra = Parallel(n_jobs=8,verbose=False)(delayed(HausdorffDistance)(
data[ptSet1][['GPSLongitude','GPSLatitude']],data[ptSet2][['GPSLongitude','GPSLatitude']]
) for ptSet1,ptSet2 in ptCom)
distancemat_tra = pd.DataFrame(ptCom)
distancemat_tra['distance'] = distance_tra
distancemat_tra = distancemat_tra.pivot(index=0,columns=1,values='distance')
for pt1 in data.keys():
distancemat_tra.loc[str(pt1),str(pt1)] = 0
distancemat_tra = distancemat_tra.fillna(0)
distancemat_tra = distancemat_tra.loc[list(data.keys()),list(data.keys())]
distancemat_tra = distancemat_tra+distancemat_tra.T
#基于方向的距離
distance_speed = Parallel(n_jobs=8,verbose=False)(delayed(HausdorffDistance)(
data[ptSet1][['speed']],data[ptSet2][['speed']]
) for ptSet1,ptSet2 in ptCom)
distancemat_speed = pd.DataFrame(ptCom)
distancemat_speed['distance'] = distance_speed
distancemat_speed = distancemat_speed.pivot(index=0,columns=1,values='distance')
for pt1 in data.keys():
distancemat_speed.loc[str(pt1),str(pt1)] = 0
distancemat_speed = distancemat_speed.fillna(0)
distancemat_speed = distancemat_speed.loc[list(data.keys()),list(data.keys())]
distancemat_speed = distancemat_speed+distancemat_speed.T
#基于方向的距離
distance_direction = Parallel(n_jobs=8,verbose=False)(delayed(HausdorffDistance)(
data[ptSet1][['direction']],data[ptSet2][['direction']]
) for ptSet1,ptSet2 in ptCom)
distancemat_direction = pd.DataFrame(ptCom)
distancemat_direction['distance'] = distance_direction
distancemat_direction = distancemat_direction.pivot(index=0,columns=1,values='distance')
for pt1 in data.keys():
distancemat_direction.loc[str(pt1),str(pt1)] = 0
distancemat_direction = distancemat_direction.fillna(0)
distancemat_direction = distancemat_direction.loc[list(data.keys()),list(data.keys())]
distancemat_direction = distancemat_direction+distancemat_direction.T
distancemat_tra = (distancemat_tra-distancemat_tra.min().min())/(distancemat_tra.max().max()-distancemat_tra.min().min())
distancemat_speed = (distancemat_speed-distancemat_speed.min().min())/(distancemat_speed.max().max()-distancemat_speed.min().min())
distancemat_direction = (distancemat_direction-distancemat_direction.min().min())/(distancemat_direction.max().max()-distancemat_direction.min().min())
distancemat = w[0]*distancemat_tra+w[1]*distancemat_speed+w[2]*distancemat_direction
return distancemat
使用前面讀取的數(shù)據(jù),計算不同軌跡間的距離矩陣,缺點(diǎn)在于計算時間會隨著軌跡數(shù)的增大而指數(shù)增長。
distancemat = DistanceMat(data,w=[0.7,0.2,0.1])
k-means聚類
獲得了不同軌跡間的距離矩陣后,就可以進(jìn)行聚類了。這里選擇k-means,為了得到更好的結(jié)果,聚類前的聚類中心選取也經(jīng)過了一些設(shè)計,排除了隨機(jī)選擇,而是選擇盡可能遠(yuǎn)的軌跡點(diǎn)作為 初始中心。
初始化聚類“中心”。隨機(jī)選取一條軌跡作為第一類的中心, 即選取一個軌跡序列作為聚類的初始“中心。然后在剩下的 L - 1 個序列中選取一個序列 X 2 作為第二類的中心 C 2 , 設(shè)定一個閾值 q, 使其到第一類的中心 C 1 的距離大于q。
class KMeans:
def __init__(self,n_clusters=5,Q=74018,max_iter=150):
self.n_clusters = n_clusters #聚類數(shù)
self.Q = Q
self.max_iter = max_iter # 最大迭代數(shù)
def fit(self,distancemat):
#選擇初始中心
best_c = random.sample(distancemat.columns.tolist(),1)
for i in range(self.n_clusters-1):
best_c += random.sample(distancemat.loc[(distancemat[best_c[-1]]>self.Q)(~distancemat.index.isin(best_c))].index.tolist(),1)
center_init = distancemat[best_c] #選擇最小的樣本組合為初始質(zhì)心
self._init_center = center_init
#迭代停止條件
iter_ = 0
run = True
#開始迭代
while (iter_self.max_iter)(run==True):
#聚類聚類標(biāo)簽更新
labels_ = np.argmin(center_init.values,axis=1)
#聚類中心更新
best_c_ = [distancemat.iloc[labels_== i,labels_==i].sum().idxmin() for i in range(self.n_clusters)]
center_init_ = distancemat[best_c_]
#停止條件
iter_ += 1
if best_c_ == best_c:
run = False
center_init = center_init_.copy()
best_c = best_c_.copy()
#記錄數(shù)據(jù)
self.labels_ = np.argmin(center_init.values,axis=1)
self.center_tra = center_init.columns.values
self.num_iter = iter_
self.sse = sum([sum(center_init.iloc[self.labels_==i,i]) for i in range(self.n_clusters)])
應(yīng)用聚類,根據(jù)平方誤差和SSE結(jié)合手肘法確定最佳的聚類數(shù),使用最佳的聚類數(shù)獲得最后聚類模型。
#聚類,保存不同的sse
SSE = []
for i in range(2,30):
kmeans = KMeans(n_clusters=i,Q=0.01,max_iter=150)
kmeans.fit(distancemat)
SSE.append(kmeans.sse)
#畫圖
plt.figure(0)
plt.plot(SSE)
plt.show()
#使用最好的結(jié)果進(jìn)行聚類
n_clusters=12
kmeans = KMeans(n_clusters=n_clusters,Q=0.01,max_iter=150)
kmeans.fit(distancemat)
kmeans.sse #輸出sse
kmeans.labels_ #輸出標(biāo)簽
kmeans.center_tra #輸出聚類中心
#畫圖,不同類的軌跡使用不同的顏色
plt.figure(1)
for i in range(n_clusters):
for name in distancemat.columns[kmeans.labels_==i]:
plt.plot(data[name].loc[:,'GPSLongitude'],data[name].loc[:,'GPSLatitude'],c=sns.xkcd_rgb[list(sns.xkcd_rgb.keys())[i]])
plt.show()
#保存每一個軌跡屬于哪一類
kmeans_result = pd.DataFrame(columns=['label','id'])
for i in range(n_clusters):
kmeans_result.loc[i] = [i,distancemat.columns[kmeans.labels_==i].tolist()]
到此這篇關(guān)于python 基于空間相似度的K-means軌跡聚類的實(shí)現(xiàn)的文章就介紹到這了,更多相關(guān)python K-means軌跡聚類內(nèi)容請搜索腳本之家以前的文章或繼續(xù)瀏覽下面的相關(guān)文章希望大家以后多多支持腳本之家!
您可能感興趣的文章:- Python中的單繼承與多繼承實(shí)例分析
- 詳細(xì)總結(jié)Python類的多繼承知識
- Python進(jìn)階學(xué)習(xí)之帶你探尋Python類的鼻祖-元類
- python利用K-Means算法實(shí)現(xiàn)對數(shù)據(jù)的聚類案例詳解
- python類的繼承鏈實(shí)例分析
- python-pandas創(chuàng)建Series數(shù)據(jù)類型的操作
- python調(diào)用stitcher類自動實(shí)現(xiàn)多個圖像拼接融合功能
- Python繪制分類圖的方法
- python實(shí)現(xiàn)批量提取指定文件夾下同類型文件
- 詳解python函數(shù)傳參傳遞dict/list/set等類型的問題
- Python中的類對象示例詳解
- 淺談Python類的單繼承相關(guān)知識